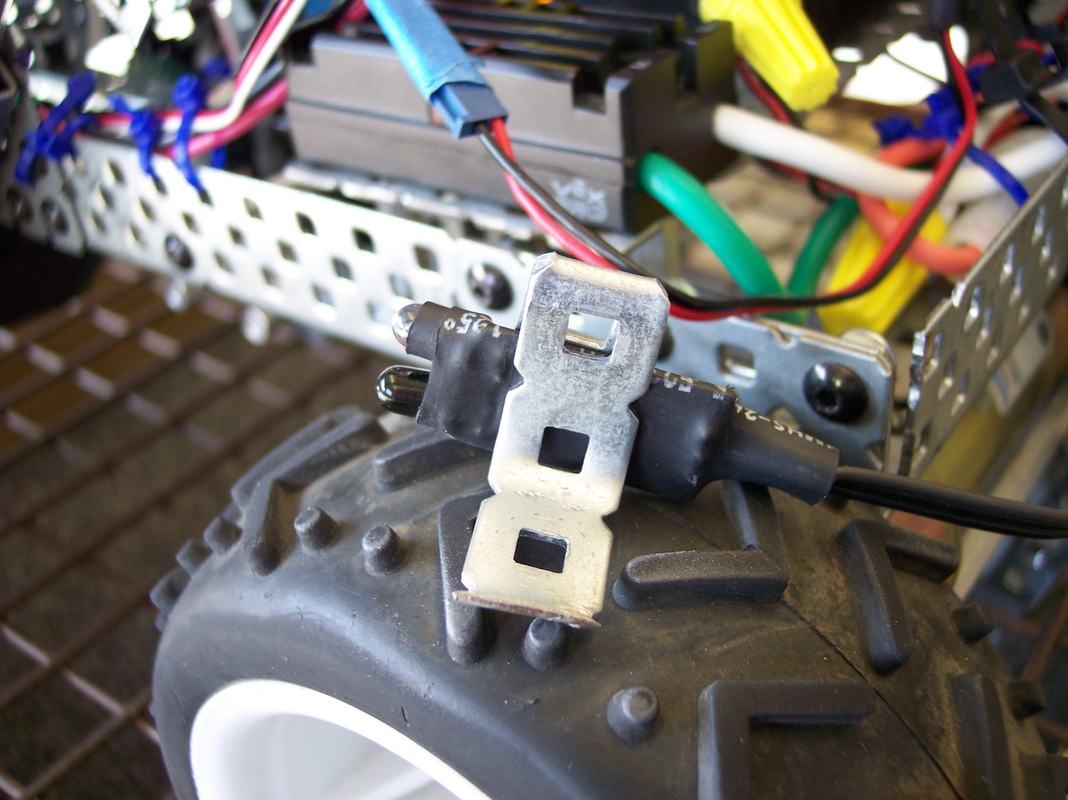
The drivers cannot see when we have a proton in the lifter, so we added a IR sensor that will signal a tone when it reads a proton.
|
We were still unsatisfied with the appendage we were using to keep ourselves on the crossover platform. So we came up with the idea to add sliders that we could extend between the top and bottom of the rails on the crossover platform.
|
Our idea failed. The sliders worked fine with the front wheels of the robot on the platform, but when we tried to lift the rear wheels, the angle caused the sliders to push up into the rail of the platform. We did not want to risk damage to the playing field, so we went back to the drawing board...
|
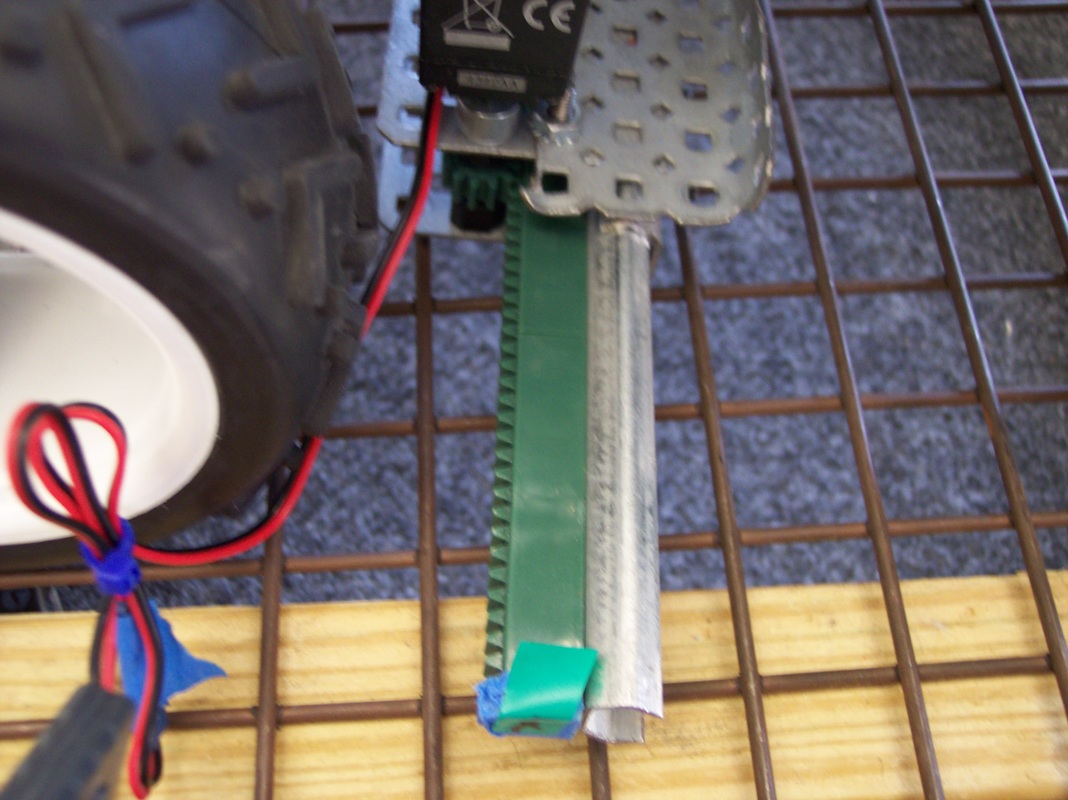
Our final attempt at a new appendage is what we are calling the stinger. Here it is mounted on the front of the robot.
|
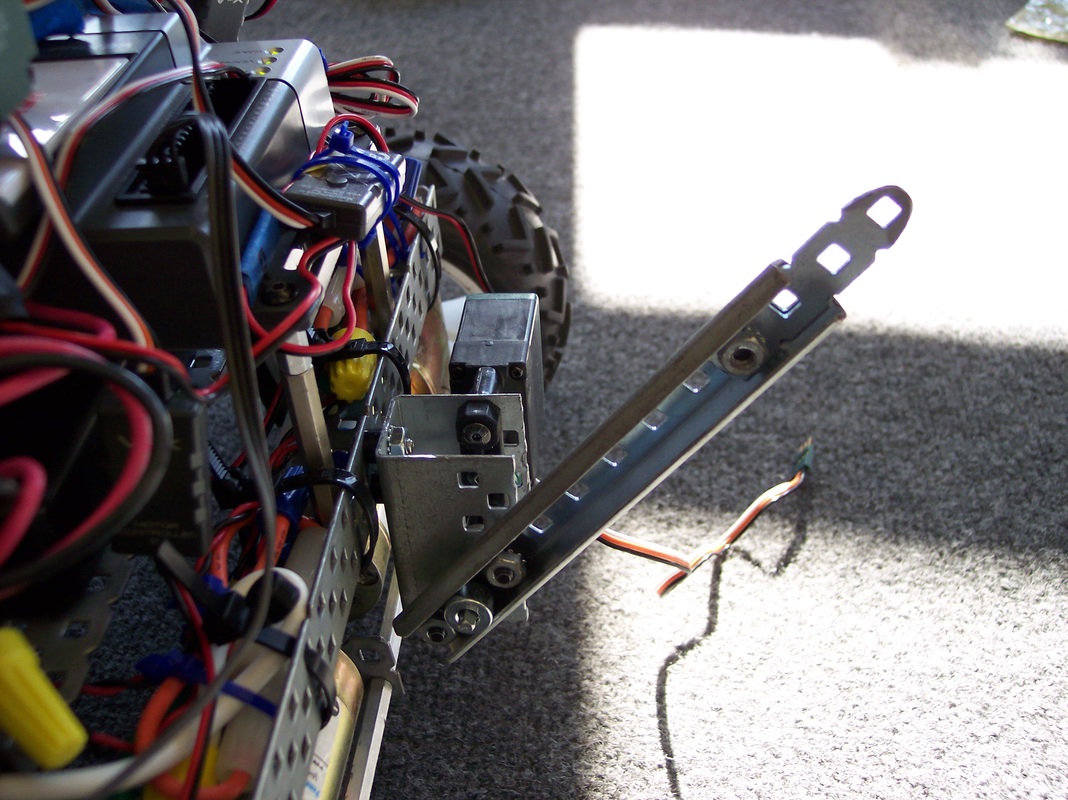
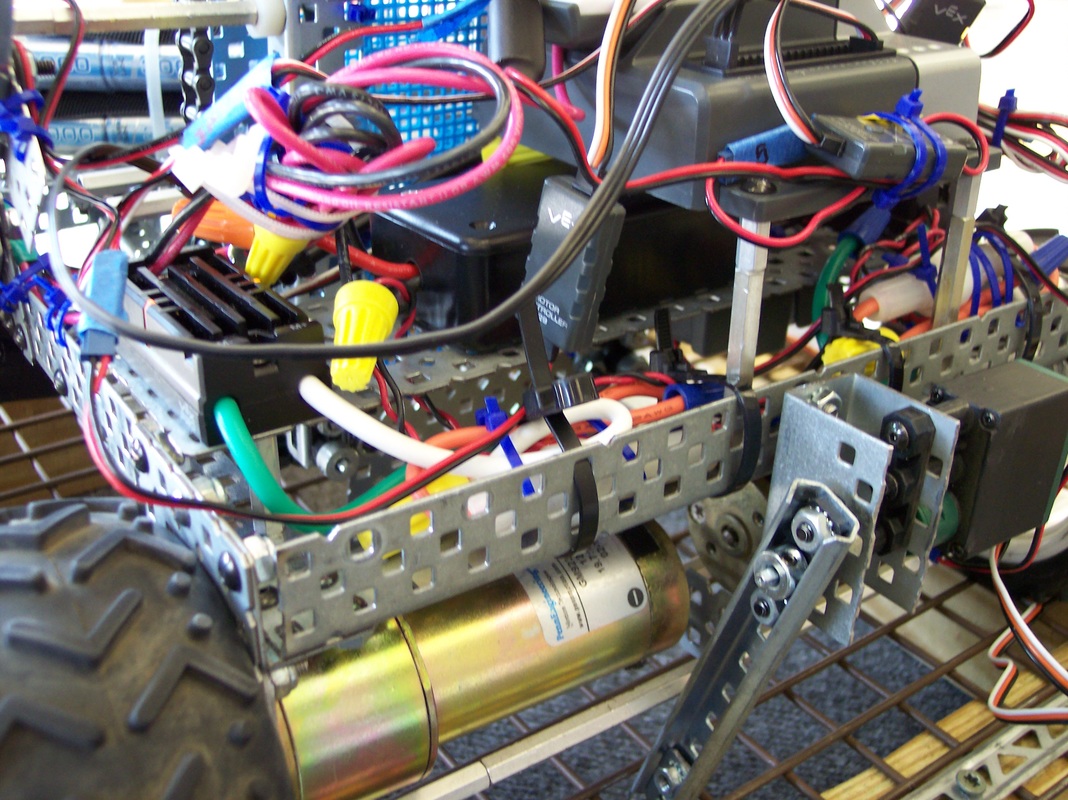
The stinger is mounted to the front of the robot and can be extended out and down from it. Notice the rounded end.
|
The idea is that the stinger can be turned down when our front end is on the crossover platform.
|
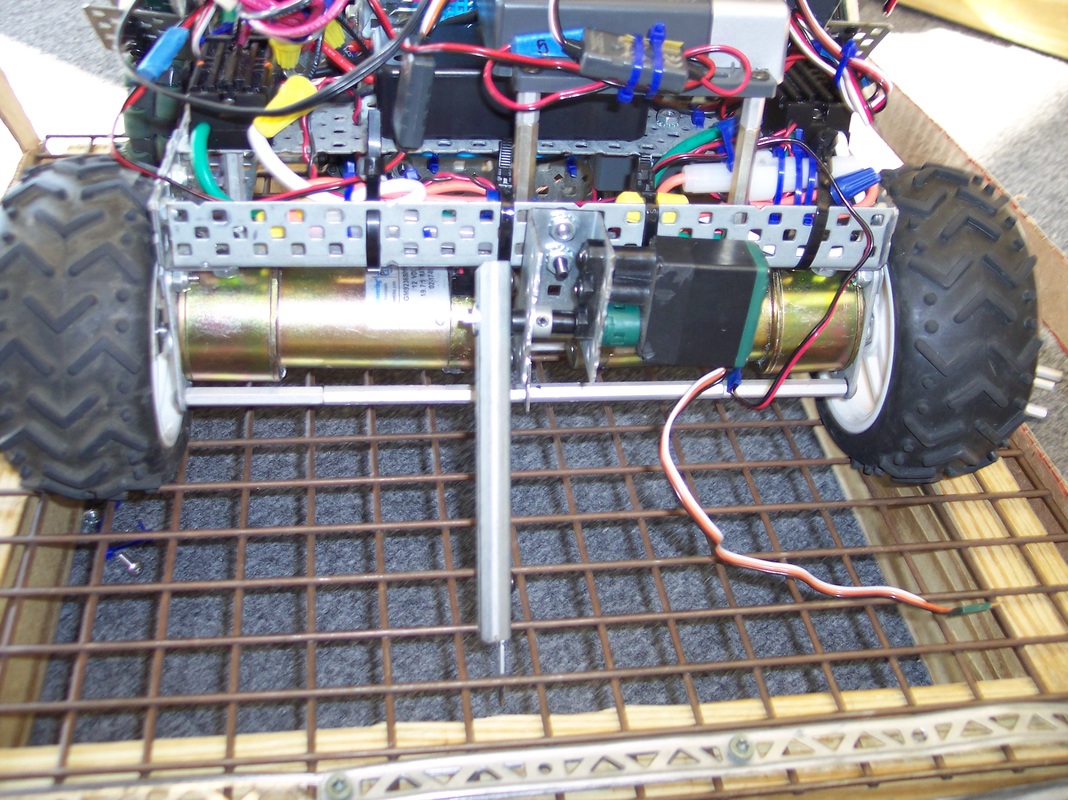
The rounded end of the stinger will go between the wire mesh.
|
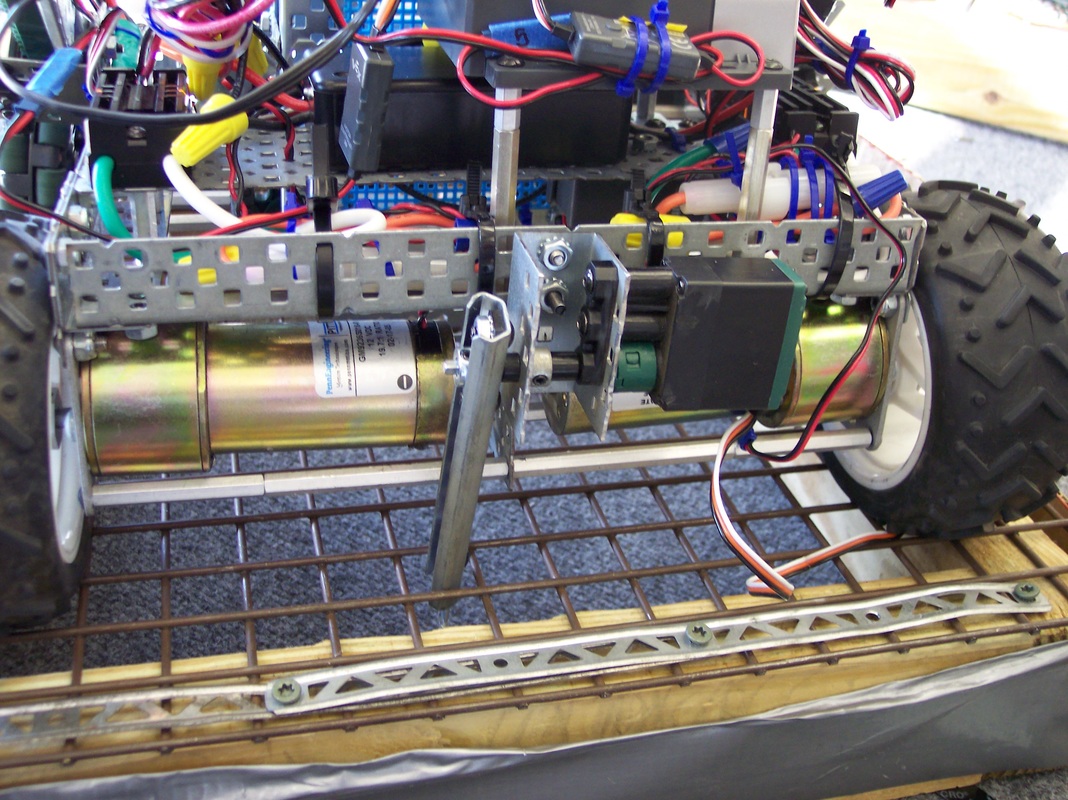
As the robot drives forward, the stinger will extend further into the mesh and come to a rest next to our 12-volt motor. This will prevent us from shooting off the end, and will, hopefully, keep us from being pushed off the crossover platform.
|
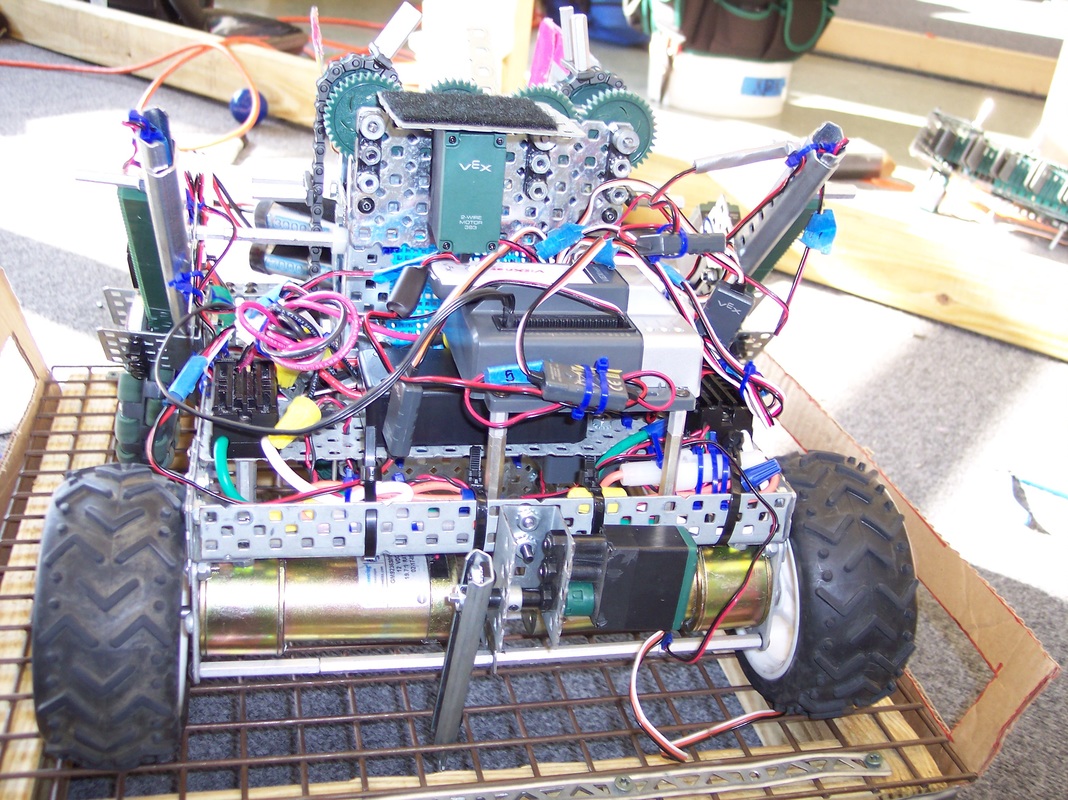
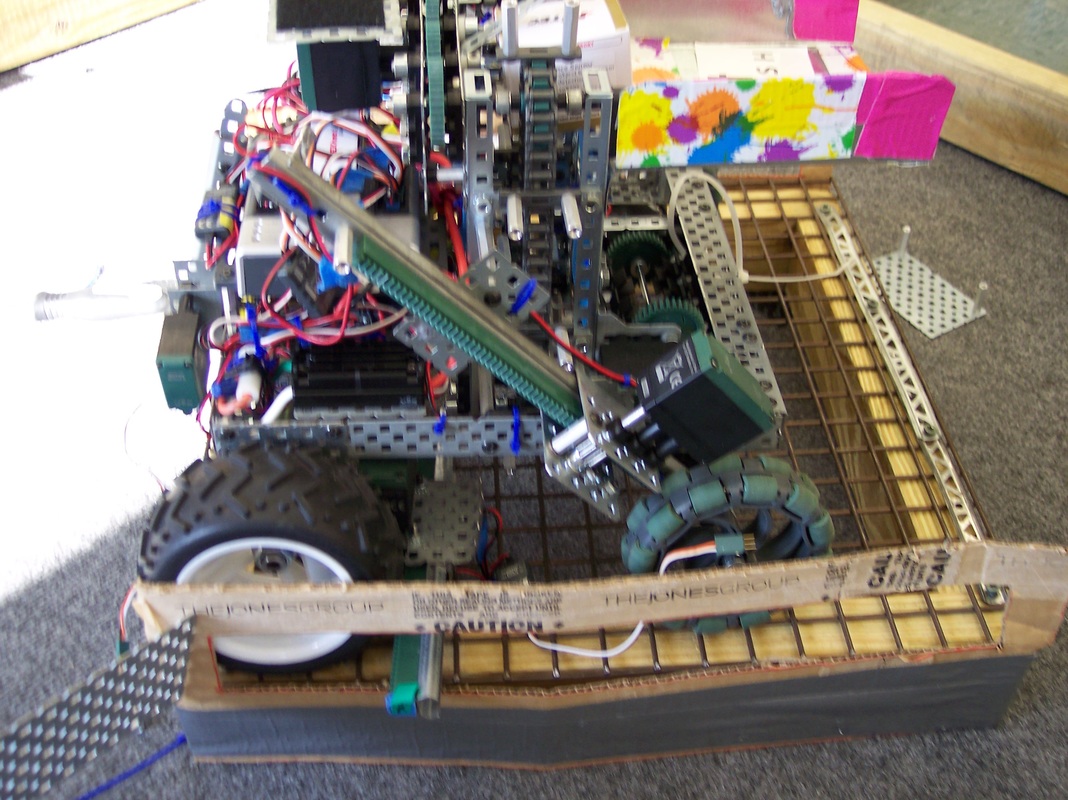
With the stinger fully deployed, we fit neatly on the platform. This is also an important point; we partially disassembled our base after the March competition to narrow the frame so we have an easier time mounting the crossover platform.
|
